Ongoing Independent Research Study / Mini-thesis
June 2023 - May 2024
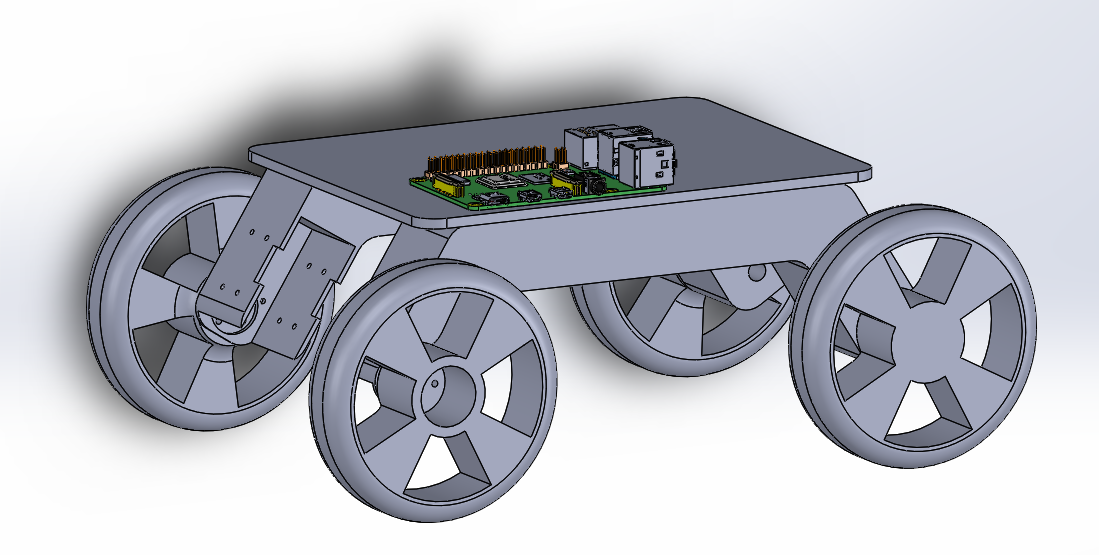
Current Project Status:
Objective:
The goal of this project is to research, design, and build a small-scale, low cost vehicle that can transverse in the x, y, and z directions within an urban environment for the purposes of manual plant pollination. The robot should be able to detect and navigate towards cucumber plant species within its environment. This project will serve as a stepping stone for future integration of the vehicle with a pollination mechanism created in parallel by another student. The vehicle should be designed with the foresight of swarming capabilities within an urban agricultural plot environment.
Skills: Python programming, raspberryPi 4B and Raspian OS, 3D modeling, rapid prototyping, technical communication, market research, engineering design process, product development, electrical circuitry, robot design, robot arm design, motor control.