BeetleBot RC Robot
Spring 2021
Project Goal: Design, 3-D model, fabricate, and build a remote controlled robot to compete in acceleration, agility, object retrieval, and weight pushing competitions.
Skills: Modeling and prototyping, 3D printing, machine shop, motor design
Project Overview:
Collaborated with my team to brainstorm and 3D model our proposed robot design.
Choose to prioritize the agility, object sorting ability, and speed of the robot by creating a 2-motor steering system, wheels with strong traction, building a wide front plot and minimizing the weight of the robot.
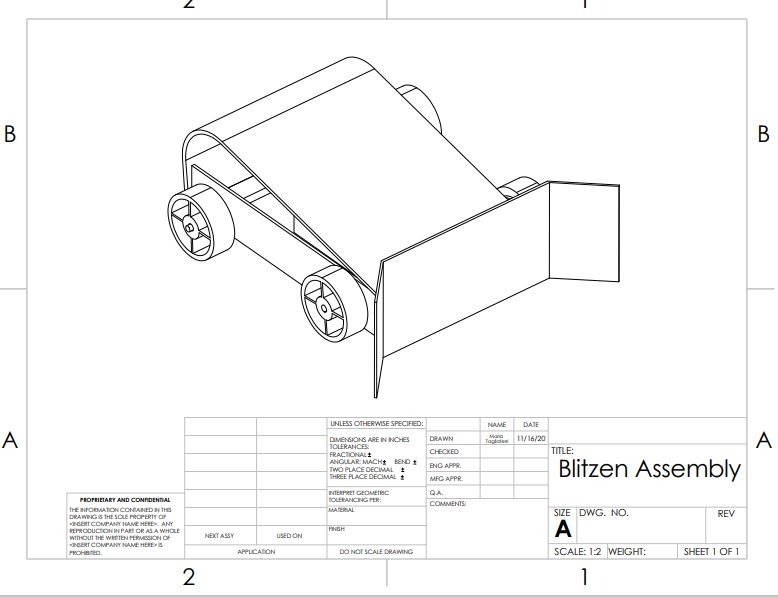
Utilized Solidworks to make drawings and assemblies for our theoretical design before moving to the machine shop to fabricate.

Side View

Celebrating our 1st place win in the agility and acceleration competitions.
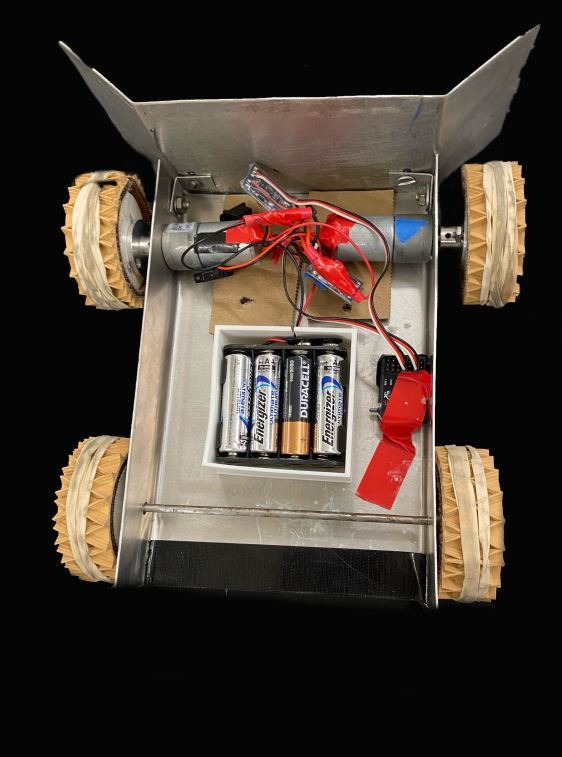
Internal View
Major Design Components:
Custom made, 3D modeled and printed wheels affixed with a durable rubber tread using strong rubber bands (due to limited budget, ideal scenario would be to use epoxy)
Motor key, axels, robot body, top cover, and front plow created by the team using aluminum stock and sheets machined using a mill, lathe, crimper, press brake, sheet metal bending machine, and saw.
Body is held together with a serious of bolts and washers as well as rivets.
2 DC motors outfitted with an RC transmitted powered by a battery pack.